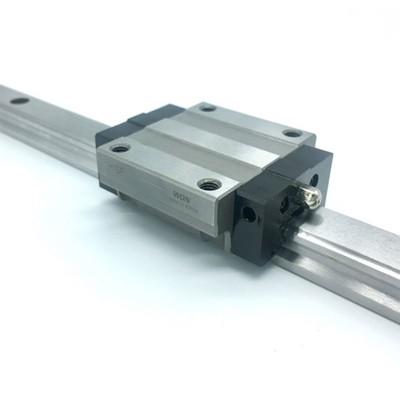



优势特点:三菱伺服电机HG-SR 1000r/min HG-SR-421(B)的控制定位的过程:驱动器里边有编制好的计算机程序,工作时驱动器便不断的按照程序发出脉冲电信号给伺服电机。伺服电机的尾部带编码器,接收到信号后便按照信号指定的转动几转进行转动,转动完成后反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子来回转动的角度,直至达到合适的位置。
三菱伺服电机HG-SR 1000r/min HG-SR-421(B)的控制定位的过程:驱动器里边有编制好的计算机程序,工作时驱动器便不断的按照程序发出脉冲电信号给伺服电机。伺服电机的尾部带编码器,接收到信号后便按照信号指定的转动几转进行转动,转动完成后反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子来回转动的角度,直至达到合适的位置。



在伺服系统选型及调试中,常会碰到惯量问题!具体表现为:1在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;2在调试时(手动模式下),正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前题,此点在要求高速高精度的系统上表现由为突出。这样,就有了惯量匹配的问题!

规格.jpg")

上一篇:没有了